Weltweit hat der zur Pepperl+Fuchs-Gruppe gehörende Anlagenbauer Polyplan aus Straßlach bei München etwa zwanzig solcher Anlagen realisiert – noch überwiegend in der Automobilindustrie. Nicht zuletzt aufgrund des Fachkräftemangels erwacht das Interesse an automatisierten KLT-Depalettieranlagen jedoch zunehmend auch in der Intralogistik von Industrieunternehmen oder von Distributions- und Verteilzentren. Auch hier sollen mehrlagig mit KLT beladene Paletten im Wareneingang oder in der Warenverteilung künftig nicht mehr manuell, sondern robotergeführt entladen werden. Die Depalettieranlagen von Polyplan lassen sich hierfür hinsichtlich Robotik, Greiftechnik, Sensorik, Steuerungstechnik, Programmierung, fördertechnischer Anbindung sowie OT- und IT-Integration gemäß Kundenvorgabe individuell auslegen. Einige Funktionen, beispielsweise die Unterscheidung verschiedener KLT-Typen, erfolgt mit Unterstützung durch Machine Learning.
Automatisiertes Depalettieren bei maximalen Freiheitsgraden

Die Flexibilität und Effizienz von Anlagen für das automatisierte Entstapeln von Paletten hängt in der Praxis erheblich davon ab, in welchem Umfang sich die Vielzahl möglicher Freiheitsgrade prozesstechnisch berücksichtigen und beherrschen lässt. Der Praxisalltag hält dabei vielfältige Herausforderungen bereit: Paletten können bis zu achtlagig oder einer Höhe von 1,4m gestapelt sein; die Palette ist zur Ladungssicherung umreift; auf der obersten KLT-Lage liegt ein Palettendeckel; auf jeder Lage befinden sich unterschiedliche KLT-Typen; das Stapelschema unterscheidet sich von Lage zu Lage und vieles mehr. Die robotergeführten Depalettieranlagen von Polyplan meistern alle diese Herausforderungen prozesssicher und kosteneffizient.
Kundennahes Engineering von Robotik und Greiftechnik
Die Auslegung einer Anlage orientiert sich zunächst an den Vorgaben des Kunden. So können die Depalettierstationen aktuell je nach Präferenz beispielsweise mit Robotern der Hersteller Kuka, ABB oder Fanuc ausgerüstet werden. Für die OT-Integration der genannten Fabrikate per Profisafe in die Anlagen-SPS verfügt Polyplan über entsprechende Technologiepakete für die jeweiligen Robotersteuerungen. Die Wahl des Roboters orientiert sich an den Gegebenheiten vor Ort sowie an der zu erwartenden Traglast. Bei einem maximalen KLT-Gewicht von 25kg und einer Greifermasse von etwa 95kg sieht Polyplan inklusive ‚Sicherheitsreserve‘ Roboter mit einer Traglast von 150 bis 210kg vor.
Vorher wissen was läuft
Im hauseigenen Vision- und Robotic-Labor kann Polyplan individuelle Aufgabenstellungen umfassend auf ihre Machbarkeit hin prüfen und die Randbedingungen bei der Auslegung einer Depalettieranlage berücksichtigen. Die Bewegungen und Greifprozesse von Robotern lassen sich so frühzeitig simulieren und optimieren.
Um die vielfältigen KLT-Typen flexibel und sicher aufnehmen zu können, rüstet Polyplan den Roboter mit einem speziellen Multifunktionsgreifer mit servomotorischer Aufnahmemechanik aus: Sie verfährt je nach Kistentyp und Orientierung automatisch und passt sich der Greiflöcherposition des betreffenden KLT an. Induktive Initiatoren überwachen die Fahr- und Greifbewegungen. Optionale Module können die Funktionalität des Roboters zusätzlich erhöhen.
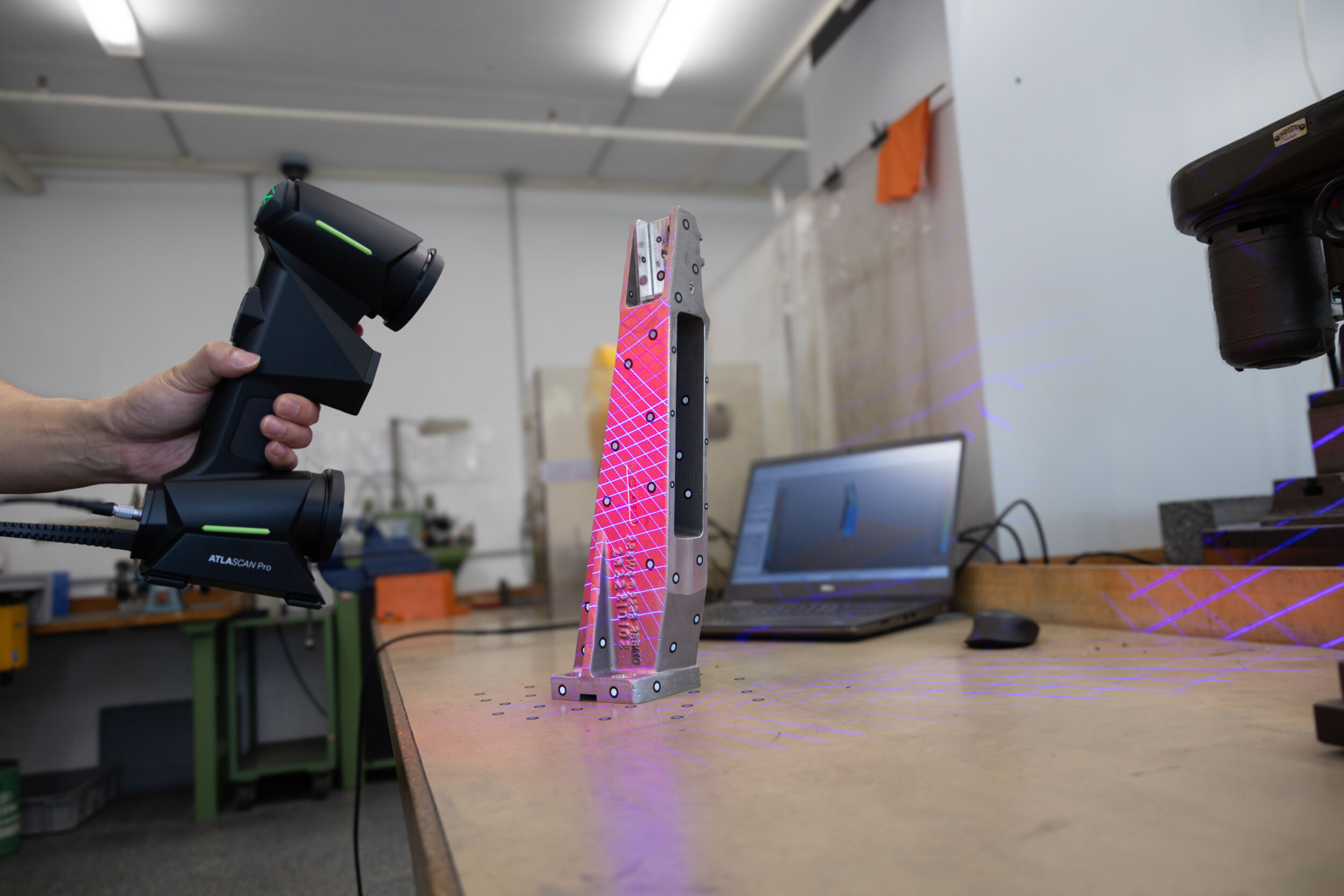
KLTs ohne Taktzeitverlust erkennen
Zu den wesentlichen Zielen beim Einsatz von Depalletierrobotern zum Entstapeln von KLTs gehören neben einem optimierten Personaleinsatz die Erhöhung des Durchsatzes. Letzteres steht in direktem Zusammenhang mit der Verkürzung von Taktzeiten. Dies erreicht Polyplan in seinen Anlagen mit einer messenden 3D-Visionlösung. Diese ermittelt zuverlässig das Stapelschema der jeweils obersten Palettenebene, identifiziert dabei die vorhanden Kistentypen und detektiert deren Orientierung. Diese Messwerte werden dann ihn Bahnkoordinaten für die Robotersichtführung umgerechnet.