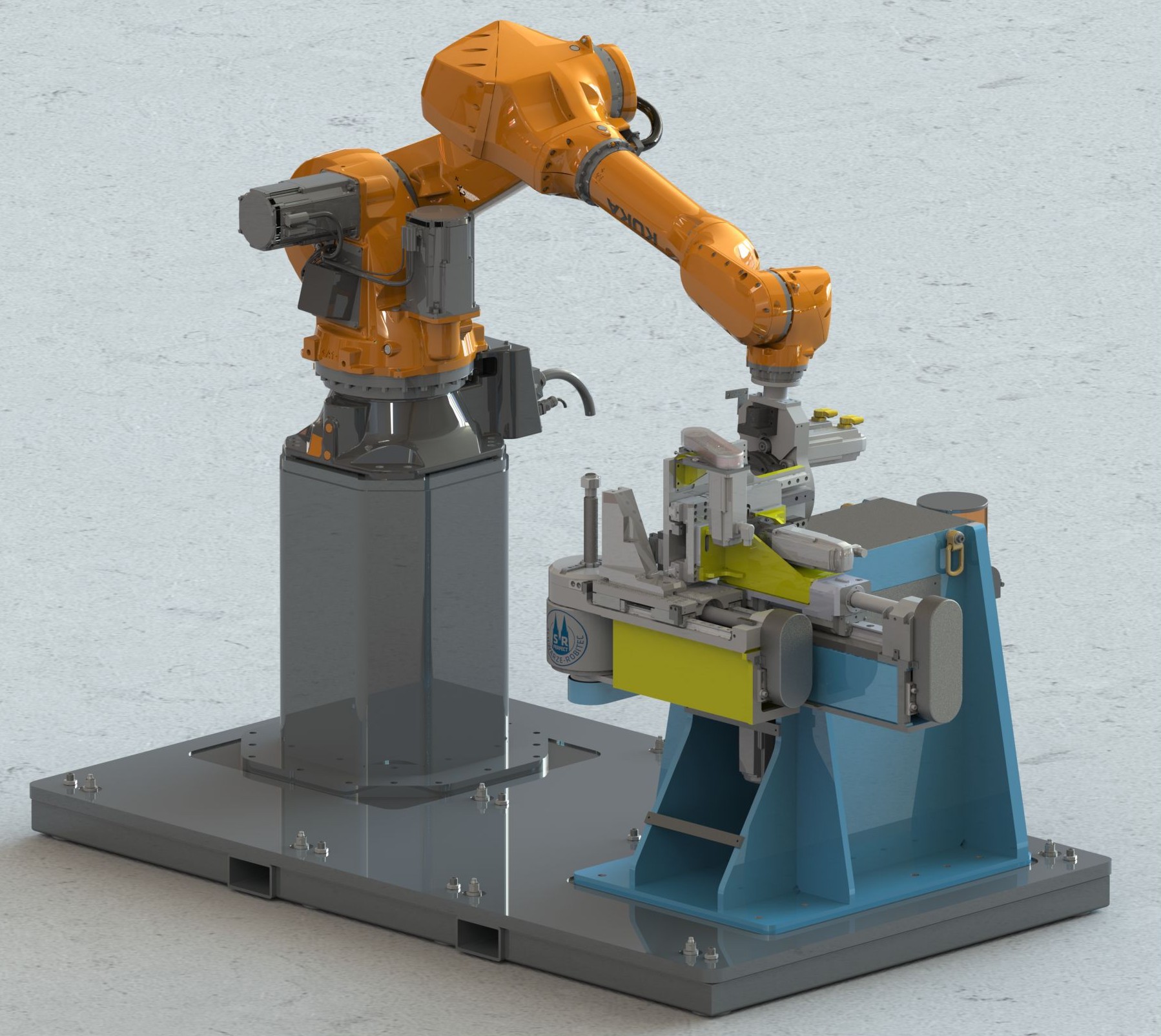
Im Rahmen des Forschungsprojekts „FlexARob“ wurde ein System aufgebaut, welches durch intelligente Einbindung von Informationen aus dem Engineering die Inbetriebnahme- und Programmierprozesse deutlich vereinfacht. Infolgedessen kann das Bedienpersonal den Prozess selbstständig und ohne Experten bewältigen. Die Projektbeteiligten entwickelten darüber hinaus eine Methode, den Ablauf abzusichern und zu optimieren. Hierzu wird ein Umgebungsmodells mithilfe des Roboters und einer Kamera dynamisch erstellt und zur kollisionsfreien Ausführung des Prozesses verwendet.
www.metav.de
Autor: D.H.