Roboter gehören zu den am meisten genutzten Automatisierungslösungen deutscher Unternehmen. Laut dem Automation Readiness Index, den das Münchener Automationsunternehmen RobCo im Oktober 2025 veröffentlichte, machen hierbei die stationären Industrieroboter 52 Prozent und die Cobots 25 Prozent aus.

Die Fertigungsindustrie ist mit 94 Prozent der größte Nutzer von Robotern. An Werkzeugmaschinen übernehmen diese immer mehr Aufgaben beim Rüsten, Beladen und Bearbeiten. Dreh- und Angelpunkt für produktive Abläufe ist dabei der Werkzeugwechsel im End-of-Arm-Tooling (EOAT), mit dem der Roboter auf die jeweils nächste Aufgabe vorbereitet wird. Mit automatischen Schnellwechselsystemen geschieht dies effizient und mannlos.
Was ein praktikables Schnellwechselsystem ausmacht
Wie ein solches System für Anwender dabei am praktikabelsten ist, damit haben sich SMW-Autoblok und SMW-Electronics befasst. Die Unternehmen mit Sitz im baden-württembergischen Meckenbeuren sind spezialisiert auf Spanntechnik sowie auf Lösungen zur Digitalisierung und Automation industrieller Prozesse.

Eines ihrer jüngsten Neuprodukte ist das automatische Schnellwechselsystem AcuGrip-TC für Greifer und andere Werkzeuge. Es bildet die praktischen Anforderungen ab, die das End-of-Arm-Tooling an einen effizienten Werkzeugwechsel stellt.
Anforderung 1: Präzision
Generell gilt der Werkzeugwechsel als ein Prozessschritt, in dem Ungenauigkeiten entstehen können. Unpräzise positionierte Werkzeuge oder Greifer beeinträchtigen die Fertigungsqualität und fördern den Werkzeugverschleiß. Der neuralgische Punkt ist dabei die Verriegelung. Das AcuGrip-TC kombiniert verschiedene Technologien, um einen fehlerfreien wie schnellen Prozess im automatischen Werkzeugwechsel sicherzustellen.
Dazu gehört zunächst eine mechanische Zentrierung der Greiferseite beim Koppeln mit der Roboterseite. Die Verriegelung selbst erfolgt pneumatisch mit einer hohen Zugkraft, die je nach Baugröße zwischen 4 und 36kN liegt. Selbsthemmende Federn halten diese Kraft auch beim Wegfall der Druckluft aufrecht. Als zusätzliche Sicherung überwachen integrierte Sensoren den Koppelungs- und Verriegelungsstatus. Fehlerhaftes oder unvollständiges Einrasten werden auf diese Weise sofort erkannt, Folgeschäden – beispielsweise durch das Abrutschen nicht korrekt gegriffener Werkstücke – vermieden. Durch dieses Sicherheitspaket bietet das AcuGrip-TC je nach Baugröße eine Wiederholgenauigkeit von ±0,0015 bis ±0,01mm, mit der sich ein Roboter in einer Dockingstation innerhalb weniger Sekunden mit dem passenden Werkzeug koppelt.
Anforderung 2: Passende Dimensionierung
Die besten Werte hinsichtlich Präzision, Sicherheit und Dynamik bieten Schnellwechselsysteme, die genau auf anzunehmende Traglasten einer Applikation ausgelegt sind. Bei der AcuGrip-TC-Serie stehen fünf Baugrößen zur Verfügung, mit denen sich der Einsatz des Systems für ein breites Spektrum an Aufgaben passend dimensionieren lässt. Dieses umfasst einfache Montage- und Handlingprozesse mit leichten Gewichten von bis zu 10 oder 35kg sowie die Maschinenbeladung mit schweren Werkstücken von bis zu 100, 350 oder 630kg. Das Handling von Kleinteilen bis 10kg ist auf diese Weise mit einem AcuGrip-TC möglich, das mit 0,26/0,14kg (Roboter-/Greiferseite) insgesamt keine 500g wiegt. Dadurch lassen sich schnelle Bewegungen mit einer Wiederhohlgenauigkeit von ±0,0015mm erzielen.
Automatisches Rüsten – SMW auf der All About Automation
Der Rüstprozess einer Werkzeugmaschine lässt sich mit SMW aus einer Hand automatisieren – vier Beispiele:
– Kommunikation und Steuerung: Mit induktiven Koppelsystemen von SMW erhält jede Komponente eine digitale Schnittstelle. Sie gestatten sowohl die Übertragung von Energie als auch der Signale zwischen Sensorik und der übergeordneten Steuerung.
– Handling und Beladung: Im End-of-Arm-Tooling (EOAT) kommen mechatronische Greifsysteme der SMW-Produktreihe Motiact zum Einsatz. Durch ein integriertes absolutes Wegmesssystem lässt sich die Lagenposition der Greifer exakt anpassen; die Greifkraft ist unabhängig von Geschwindigkeit und Hub in feinen Abstufungen einstellbar.
– Positionieren und Spannen: Auch für seine Spannmittel erzielt SMW mit integrierter Sensorik Vorteile für die Variabilität und Prozesssicherheit. Beispiel hier ist der digitale Werkstückanschlag ‚e-sensing‘, der in einem Messbereich von 5mm sensorisch prüft, ob das zu bearbeitende Bauteil korrekt aufliegt.
– Wechseln: Neben dem AcuGrip-TC bietet SMW weitere Lösungen für automatische Wechselprozesse. So können Backenwechsel beim Langhubspanner SLX digit per Roboter erfolgen. Mit dem Nullpunktspannsystem ZeroAct e-motion wird auch der automatisierte Palettenwechsel machbar.
SMW-Autoblok und SMW-Electronics auf der All About Automation in Friedrichshafen: 10. + 11. März 2026, Stand B2-312
Die Baugrößen am oberen Ende der Reihe sind den höchsten Traglasten vorbehalten. Mit einem Eigengewicht von insgesamt 11,4kg (6,5/4,9kg) gewährleistet das AcuGrip-TC für Handlinggewichte von bis zu 630kg eine hohe Wiederholgenauigkeit von ±0,01mm. Optional stellt SMW Varianten für noch höhere Traglasten bereit.
Anforderung 3: Variabilität
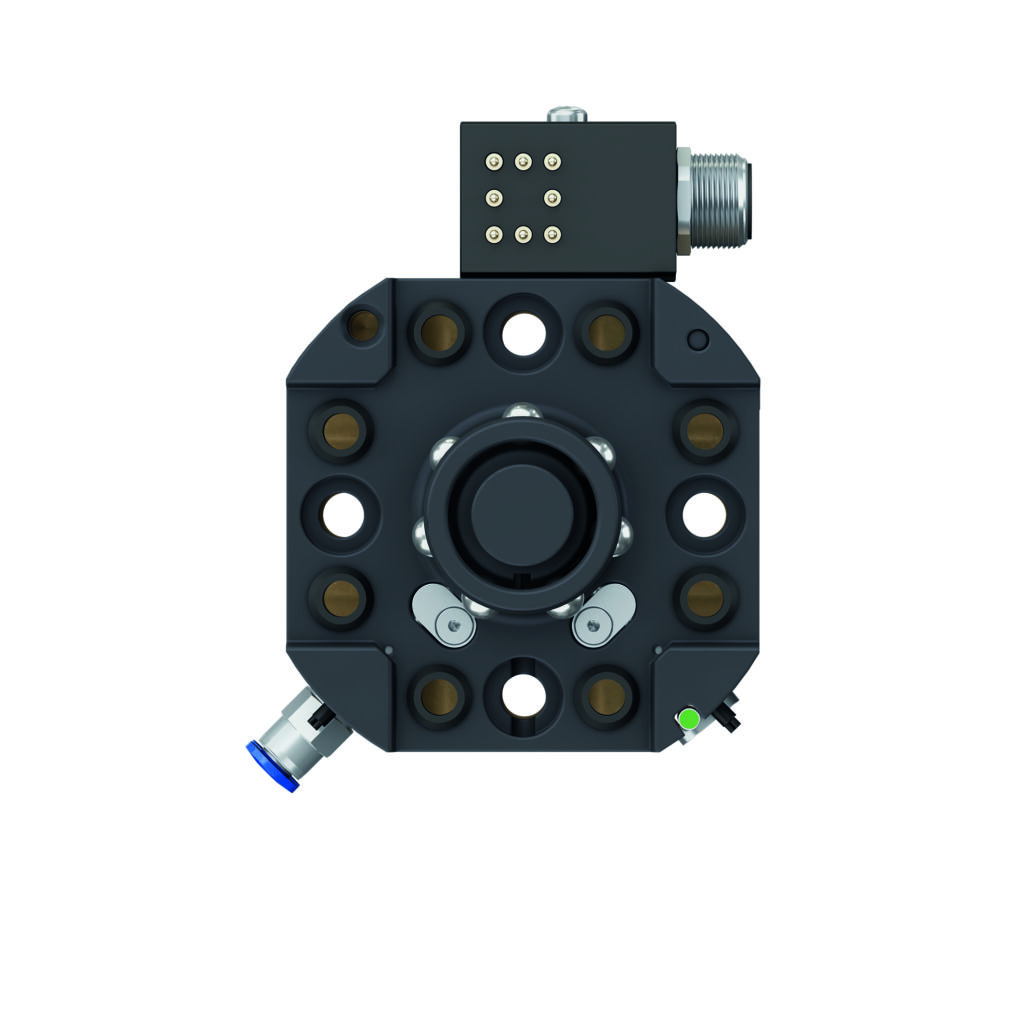
Die Stärke des EOAT ist die Vielseitigkeit: Roboter führen mehrere unterschiedliche Bearbeitungsschritte ohne Unterbrechung nacheinander durch. Ein automatisches Schnellwechselsystem erweitert diese Variabilität. Das AcuGrip-TC bietet dafür einen Baukasten an Übergabemodulen für unterschiedliche Medien- und Signalübergaben. Sie erlauben sowohl den Betrieb pneumatisch und elektrisch betriebener Greifer als auch die Integration von Sensoren.
Roboter übernehmen an Werkzeugmaschinen immer mehr Aufgaben
Je nach Baugröße verfügt das System über vier bis 14 Modulplätze. Damit lässt sich in einem Produktionszyklus eine Vielzahl an Werkzeugoptionen ohne Umstecken von Kabeln und Schläuchen nahtlos ansteuern. Diese Flexibilität bedeutet darüber hinaus einen vergleichsweise niedrigschwelligen Einstieg in die Automatisierung: Das System passt sich jeder Automationsumgebung an, lässt sich einfach installieren und ermöglicht – auch mit seinem nach ISO 9409 genormten Montageflansch – die Anbindung einer großen Bandbreite bestehender Greifsysteme und Werkzeuge.
Anforderung 4: Hohe Verfügbarkeit
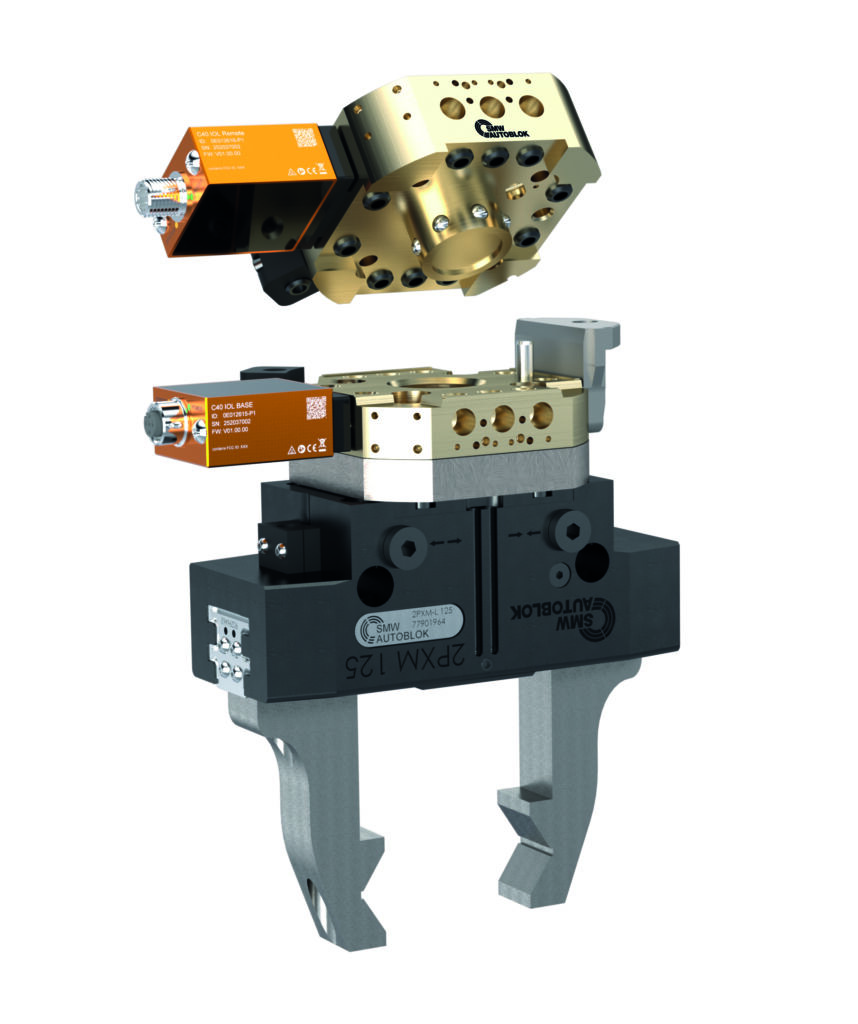
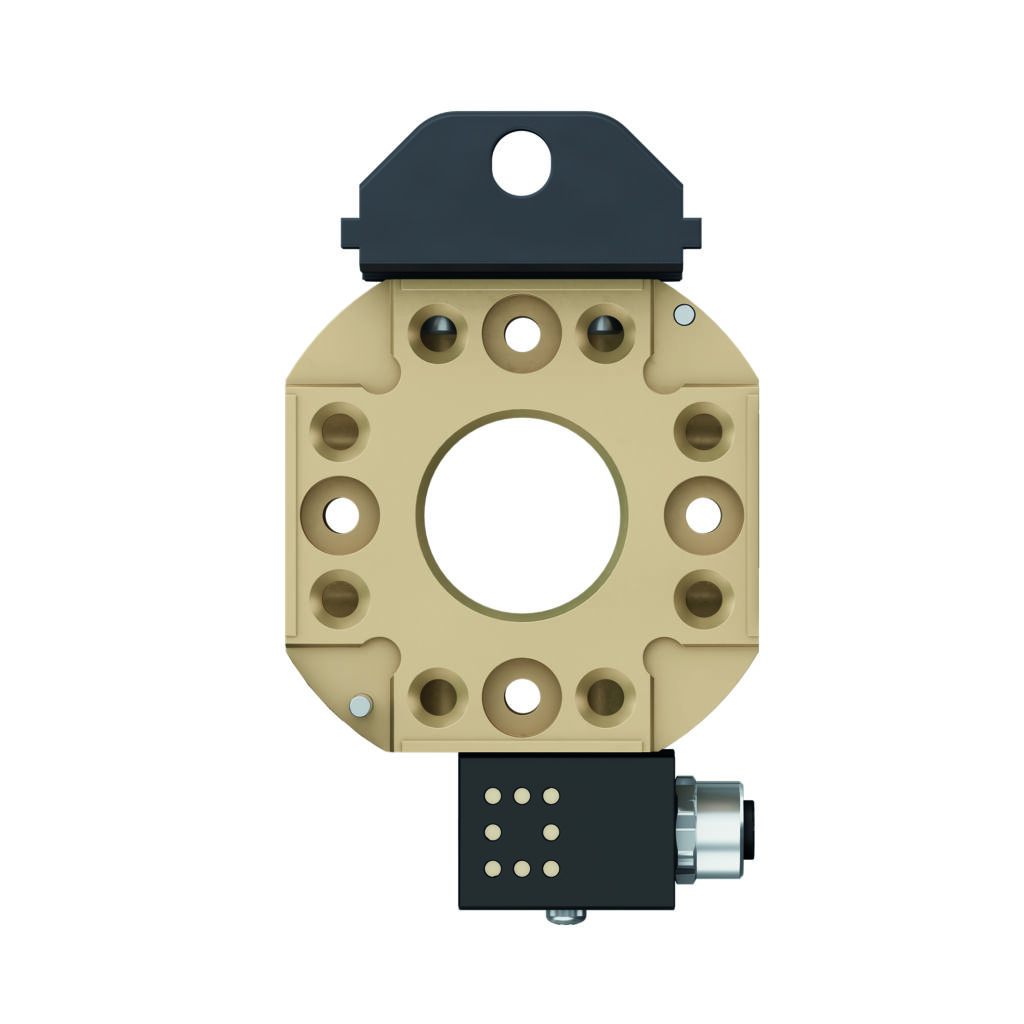
Für alle Automationskomponenten in der zerspanenden Fertigung ist die Herausforderung gleich: Sie müssen robust gebaut sein, um unter den rauen Einsatzbedingungen langfristig verlässlich zu funktionieren, und das im Idealfall mit geringem Wartungsaufwand. Das AcuGrip-TC kann dafür optional mit dem induktiven Koppelsystem C40 Automation ausgerüstet werden. Dadurch werden Medien- und Signalübergabe weitestgehend unempfindlich gegen Verschmutzungen, denn das Koppelsystem gestattet die kontaktlose und somit verschleißfreie Energie- und Signalübertragung zwischen Greifer und Roboter. Die Übergabe erfolgt über einen Luftspalt von 0 bis 3mm.
Das kubische Koppelsystem entwickelte SMW speziell für die Automatisierung von Wechselanwendungen. Es besteht aus einem Base-Element für die Roboter- und einem Remote-Element für die Greiferseite. Auf diese Weise werden Greifer und seine Sensorik mit 15W Energie versorgt und zugleich die Signalübertragung zwischen Greifeinheit und Steuerungsebene realisiert. Das C40 Automation ist für die Signalübertragung per IO-Link und PNP/Analogsignale erhältlich. Es ist nach IP67 geschützt und vibrationssicher. Mithilfe eines Montage-Kits kann es einfach an fast allen gängigen Schnellwechselsystemen nachgerüstet werden.
Automation erhöht die Wettbewerbsfähigkeit
Mit diesen Eigenschaften tragen automatische Werkzeugwechsel entscheidend dazu bei, Rüstzeiten zu verkürzen.
Damit lässt sich in der Teilefertigung auch bei zunehmender Teilevielfalt und -komplexität sowie sinkenden Stückzahlen die Produktivität beibehalten: In der mannlosen Fertigung sind selbst mit der sinkenden Zahl an Fachkräften Fertigungsabläufe sicher durchführbar, und mit der gesteigerten Flexibilität lassen sich einzelne Produktionslinien auch für die Fertigung mehrerer Teile nutzen.